D. Ristow
Die Kenntnis der reststatischen Korrekturen ist eine der wichtigsten Voraussetzungen für die Stapelung von landseismischen Profilen.
Seit einigen Jahren gibt es in der digitalen Seismogrammbearbeitung viele automatische Verfahren zur Berechnung der reststatischen Korrekturen. Trotz der Verschiedenartigkeit ihrer Durchführung ist die Grundlage fast immer dieselbe. Jeder Schußposition und jeder Geophonposition entspricht eine individuelle Schußrestkorrektur und Geophonrestkorrektur, und jede dynamisch und feldstatisch korrigierte Spur wird um die Summe dieser Restkorrekturen verschoben.
Vergleicht man zwei Spuren eines gemeinsamen CDPPunktes miteinander, so wird man feststellen, daß sie um einen gewissen Zeitbetrag Δt gegeneinander verschoben sind. Diese Zeitverschiebung kann relativ einfach durch spezielle Kreuzkorrelationsmethoden bestimmt werden.
Die Zeitverschiebung läßt sich durch die Summe von Schuß-und Geophonkorrekturen darstellen. Durch Vergleich vieler Spuren miteinander erhält man hinreichend viele Bedingungsgleichungen, um nach der Methode der kleinsten Quadrate die Rest-Schuß-und Rest-GeophonKorrekturen berechnen zu können. Hierbei sind die folgenden Schritte erforderlich:
Fig. 1
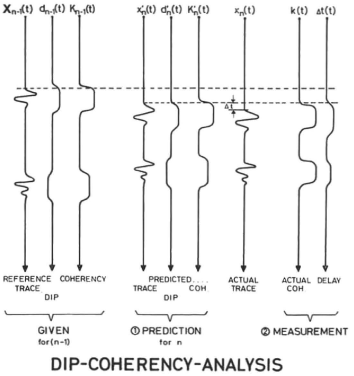
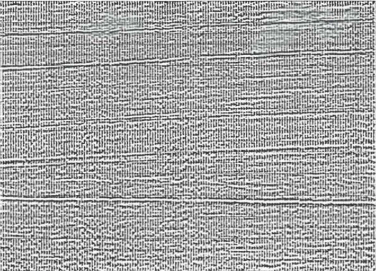
Fig. 3
Static Residual Corrections with the ASP-System
Reliable residual static corrections are most important in the stacking of land seismic sections.
In digital seismogram processing there have been many automatie procedures for calculating the residual static corrections for some years. In spite of the variability in their execution its principle is nearly always the same. Each shot position and each geophone position corresponds to an individual shot residual correction and geophone correction and each dynamically and field-statically corrected trace is shifted by the sum of these residual corrections.
If one compares any two traces of a common COP-point, one will note that they differ by a certain time shift, say Δt. This time shift can be determined relatively simply by means of special cross-correlation methods, and it can be presented by the sum of a shot and a geophone correction. Upon comparison of many such traces with each other one obtains a sufficient number of equations of condition to compute the residual shot-and residual geophone corrections according to the least squares method. The following steps are required hereby:
- The measurement of time differences between certain traces,
- Presentation of the time differences by shot-and geophone corrections,
- Least-mean-squars fit and calculation of the residual corrections.
This procedure is called surface-consistent as practically only the conditions of the earth's surface enter into it.
A further possibility to determine the residual static corrections is presented by the PRAKLA-SEISMOS ASPSystem.
Before discussing the procedure in detail we need to consider the " reference" trace in the ASP-System:
The reference trace for the reflection subsurface point (n) is a seismic trace that has been averaged over several subsurface points (n, n-1, n-2, etc.) taking into consideration the dip of the reflection elements. Hereby, the individual weighting of the traces becomes smaller with increasing distances from the subsurface point (n). Therefore, the reference trace for the COP-point (n) is a reproduction of the global seismic structure without finer details. We now want to explain the practical computation of the reference trace by the dip-coherency-analysis in a simple sketch as shown in figure 1:
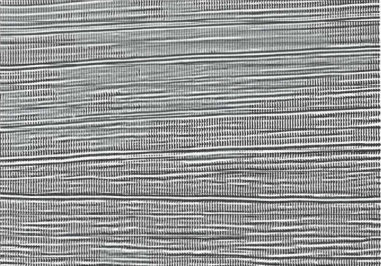
Fig. 4
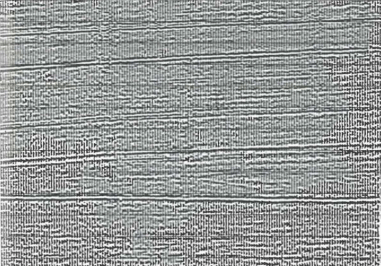
Fig. 5
- Messen von Zeitdifferenzen zwischen bestimmten Spuren,
- Darstellung der Zeitdifferenzen durch Schuß-und Geophon-Korrekturen,
- Ausgleichsrechnung und Ausrechnung der Restkorrekturen.
Man nennt dieses Verfahren oberflächen-konsistent, weil praktisch nur die Bedingungen der Erdoberfläche eingehen.
Eine andere Möglichkeit, die reststatischen Korrekturen zu bestimmen, ist durch das PRAKLA-SEISMOS-ASP-System gegeben.
Vor der Erläuterung dieses Verfahrens müssen wir auf die " Referenzspur" im ASP-System etwas näher eingehen:
Die Referenzspur für den Reflexionsuntergrundpunkt (n) ist eine über mehrere Untergrundpunkte (n, n-1 , n-2 usw.) unter Berücksichtigung der Neigung der Reflexionselemente (Dip) gemittelte seismische Spur. Bei der Mittelung bekommen die Einzelspuren ein Gewicht, das umso kleiner ist, je weiter der entsprechende Untergrundpunkt vom Untergrundpunkt (n) entfernt ist. Die Referenzspur für den COP-Punkt (n) gibt also die globale seismische Struktur wieder, Feinstrukturen sind wenig oder kaum enthalten. Wir wollen nun die praktische Berechnung der Referenzspur bei der Dip-Kohärenz-Analyse anhand eines einfachen Prinzipbildes in Figur 1 erläutern:
Gegeben seien für den Untergrundpunkt (n-1) die Referenzspur Xn-1(t), die Dipfunktion dn-1(t) und die Kohärenzfunktion Kn-1(t). Die Dipfunktion gibt für jedes Sampie die Neigung der evtl. vorhandenen Reflexionen an. Die Kohärenzfunktion Kn-1(t) ist ein Maß für die Zuverlässigkeit der Referenzspur Xn-1(t) und der Dipfunktion. Bei kleiner Kohärenz ist z. B. die Zuverlässigkeit der Referenzspur gering. Alle drei Funktionen sind gemittelte, oder besser gesagt, aufdatierte Funktionenn, die für den Untergrundpunkt (n-1) gültig sind.
Es erfolgt jetzt die Vorhersage: Mit Hilfe der Referenzspur Xn-1(t) und der Dipfunktion dn-1(t) läßt sich eine Spur X'n(t) für den Untergrundpunkt (n) vorhersagen. In entsprechender Weise gilt dies für die vorhergesagte Dipfunktion d'n(t) und die Kohärenzfunktion K'n(t). Anschließend wird die vorhergesagte Spur X'n(t) mit der wirklich gemessenen, dynamisch und statisch korrigierten "aktuellen" Spur Xn(t) verglichen. Nun bestimmt man mittels der bereits erwähnten speziellen Korrelationsmethoden die Zeitverschiebungen Δt(t) und die Ähnlichkeit zwischen der vorhergesagten Spur und der aktuellen Spur in Form der aktuellen Kohärenz k(t). Sind alle Zeitverschiebungen Δt(t) gleich Null, so bedeutet dies, daß sich der Dip nicht geändert hat. Im allgemeinen sind aber die Zeitverschiebungen von Null verschieden. Das bedeutet aber, daß wir die Dipfunktion mit Hilfe der Zeitverschiebungsfunktion Δt(t) etwas nachkorrigieren müssen.
Wesentlich ist nun folgendes: Die Dipfunktion d'n(t) wird nur dort wesentlich verändert, wo die aktuelle Kohärenz k(t) groß ist. Man erhält auf diese Weise eine veränderte Dipfunktion dn(t), die für den Untergrund punkt (n) gültig ist. Wegen der neuen Dipfunktion dn(t) können wir die vorhergesagte Spur X'n(t) etwas nachkorrigieren, so daß X'n(t) und Xn(t) praktisch keine Zeitverschiebungen mehr aufweisen.
Wenn die aktuelle Kohärenz k(t) ungefähr gleich der gemittelten aufdatierten Kohärenz K' n(t) ist, so ist die neue Referenzspur Xn(t) gleich dem Mittel aus der aktuellen und der vorhergesagten Spur. Wenn aber z. B. die aktuelle Kohärenz k(t) kleiner ist als die Kohärenz K'n(t), so geht die aktuelle Spur beim Aufdatieren mit geringerem Gewicht ein. Auf diese Weise werden nur Werte auf· datiert, die ein gewisses Maß an Glaubwürdigkeit besitzen.
Abschließend muß auch die Kohärenz aufdatiert werden. Somit erhält man für den Untergrundpunkt (n) drei neue Zeitfunktionen:
Die Dipfunktion dn(t), die Kohärenzfunktion Kn(t) und die neue Referenzspur Xn(t).
Dieses System läßt sich erweitern, indem noch zusätzlich für jeden Untergrundpunkt die Stapelgeschwindigkeitsfunktion aufdatiert wird. Hierfür werden dynamisch unkorrigierte seismische Spuren analysiert. Man beginnt die Analyse bei einem Reflexionsuntergrundpunkt, wo die Geschwindigkeitsfunktion mit guter Annäherung bekannt ist. Die Zeitverschiebungen zwischen vorhergesagter Spur und der dynamisch korrigierten aktuellen Spur lassen sich mit Hilfe einer Dip-Änderung und einer Geschwindigkeitsänderung darstellen. Die Aufspaltung und die Aufdatierung für Dip und Geschwindigkeit erfolgt dann für jedes Sampie mit Hilfe von statistischen Methoden.
Bei der Bestimmung der reststatischen Korrekturen spielt die Referenzspur also eine wichtige Rolle. Durch die Mittelung über viele Untergrundpunkte enthält sie nur noch wenig Noise.
Die Referenzspur, gültig für den Untergrundpunkt (n-1) läßt sich also mit Hilfe der Dip-Funktion auf den Untergrundpunkt n vorhersagen. Als Ergebnis erhält man die vorhergesagte Spur X'n(t) (s. Figur 2). In dieser Figur enthalten die vorhergesagte Spur X'n(t) und die aktuelle Spur Xn(t) mehrere Reflexionen. Wenn die Einsätze der aktuellen Spur gegenüber den entsprechenden Einsätzen auf der vorhergesagten Spur um etwa denselben Betrag verschoben sind, kann dieser Betrag als statische Kor· rektur aufgefaßt werden. Man ermittelt diesen Betrag statn, indem man die Zeitverschiebungsfunktion Δt(t) über alle t mittelt, wobei die aktuelle Kohärenz als Gewichtsfunktion eingeht. Dabei ist zu beachten, daß die Folge der statischen Verschiebungen statn, über mehrere Spuren um einen Nullpegel schwanken muß. Ist diese Schwankung um das Null-Niveau nicht vorhanden, so könnten fälschlicherweise Dipänderungen als statische Restkorrekturen interpretiert werden.
Die aktuelle Spur Xn(t) wird nun um die statische Korrektur verbessert und man erhält die Spur Xn (t-statn). Diese neue Spur kann gegenüber der vorhergesagten Spur aber immer noch Zeitverschiebungen aufweisen. Diese werden in einer anschließenden Analyse als Dip-und Geschwindigkeits-Änderungen interpretiert.
In Figur 3 (Seite 16) ist eine seismische Sektion dargestellt, die einer digitalen Bearbeitung mit den bisher üblichen Prozessen unterworfen wurde. In Figur 4 sehen wir dieselbe Sektion nach einer Behandlung mit Hilfe des ASP-Verfahrens. Die Stapelgeschwindigkeitsfunktion und die reststatischen Korrekturen wurden hierbei simultan bestimmt und automatisch vor dem Stapeln angebracht. Offensichtlich ist das Ergebnis nach dem ASP-Verfahren in diesem Beispiel besser als das konventionelle Bearbeitungsergebnis, da viele Störschwingungen zwischen den Reflexionshorizonten verschwunden sind und die Reflexionen klarer hervortreten.
In Figur 5 sind die Referenzspuren dargestellt. Auch hier ist im Vergleich zum konventionellen Stapelprofil das Signal-Noise-Verhältnis stark verbessert. Für eine seismische Interpretation ist diese Sektion jedoch ungeeignet, da die seismischen Feininformationen unterdrückt worden sind.
For the subsurface point (n-l) are given the reference trace Xn-1(t), the dip function dn-1(t), and the coherency function Kn-1(t). The dip function indicates, for each sampie, the dip of any reflections possibly present. The coherence function Kn-1(t) is a measure for the reliability of the reference trace Xn-1(t) and the dip function. Where the dip function is smalI, the reliability of the reference trace is minor. All three functions are averaged or, rather, up-dated functions which are valid for the subsurface point (n-1).
The prediction is effected now: With the aid of the reference trace Xn-1(t) and the dip function dn-1(t), a trace X'n(t) is predicted for the subsurface point (n). In a similar fashion, the same is valid for the predicted dip function d'n(t) and the coherence function K'n(t). The predicted trace X'n(t) is subsequently compared with the actually measured trace Xn(t) which has dynamically and statically been corrected. By means of special correlation methods one now determines the time shifts Δt(t) and the similarity between the predicted trace and the actual trace in the form of the actual coherence k(t) for each sampie. If all time shifts Δt(t) equal zero, the dip has not changed. Generally, however, the time shifts vary from zero and this means that we have to correct the dip function somewhat with the aid of the time-shift function Δt(t).
Significant is that the dip function d'n(t) is only substantially altered where the actual coherence k(t) is large. In this way one obtains a changed dip function dn(t) which is valid for the subsurface point (n). Because of the new dip function dn(t) we can now correct the predicted trace X'n(t) as required so that X'n(t) and Xn(t) exhibit practically no more time shifts.
Jf the actual coherence k(t) is approximately equal to the averaged up-dated coherence K'n(t), then the new reference trace Xn(t) equals the mean from the actual and predicted trace. However, if for example, the actual coherence k(t) is smaller than the coherence K'n(t), the actual trace is, upon up-dating, entered with less weighting. In this way only va lues are up-dated which contain a certain degree of reliability.
Subsequently, the coherence must be up-dated, tao. In doing this one obtains three new time functions for the subsurface point (n): The dip function dn(t), the coherence function Kn(t) .and the new reference trace Xn(t).
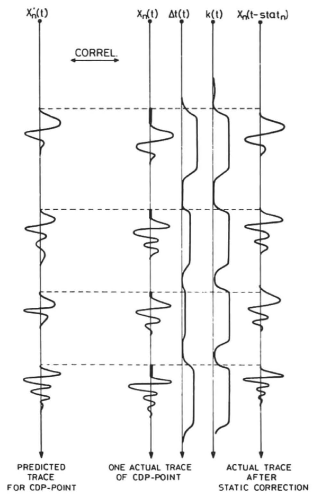
Fig. 2
The system can be expanded by additionally up-dating the stacking-velocity function for each subsurface point. For this, dynamically uncorrected seismic traces are analysed. One starts the analysis at one reflection subsurface point where the velocity function is reasonably well-known. The time-shifts between the predicted trace and the dynamically-corrected actual trace can be presented with the aid of a dip change and a velocity change. The splitting and up-dating for dip and velocity is effected for each sampie by means of statistical methods.
The reference trace, therefore, plays an important role in the determination of the residual static corrections. After averaging over many subsurface points it contains only little noise.
The reference trace, valid for subsurface point (n-1), can therefore be predicted onto subsurface point (n), with the aid of the dip function. As a result, the predicted trace X'n(t) is obtained (see figure 2). In this figure, the predicted trace X'n(t) and the actual trace Xn(t) contain several reflections. If the events on the actual trace are shifted against the respective events of the predicted trace by approximately the same amount, then this amount can be considered as static correction. This amount, statn, is determined by averaging the time-shift function Δt(t) over all t values, whereby the actual coherence enters as a weighting function. Hereby, note must be taken to the sequence of static shifts, statn, that they vary around zero over several traces. If this scattering is not present then dip changes could erroneously be interpreted as static residual corrections.
The actual trace Xn(t) is now improved by the static correction and the trace Xn (t-statn) is obtained. This new trace will still contain time variant time shifts. These are now interpreted in the subsequent analyses as dip and velocity changes.
A seismic section is presented in figure 3 (page 16), which has been subject to digital processing employing conventional processes. In figure 4 we see the same section after applying the ASP-process. The stacking-velocity function and the residual static corrections were hereby determined simultaneously and aplied automatically before stacking.
Obviously, the section processed with the ASP-program is in this example superior to the conventional processing. The noise between the reflection horizons has been attenuated and the reflections have become more distinct.
Figure 5 shows the reference traces. Here, too, the signalto-noise ratio has been improved in comparison to the conventional stacked section. This section is, however, unsuitable for a seismic interpretation, as the seismic fine structure is suppressed.